中科院智能所研發水面自動清潔機器人 實現遠程危險區域作業

水面機器人可能有部分朋友有聽說過,其主要是針對水面污染進行分析以及進行清理作業。近日,從中科院合肥研究院獲悉,中科院合肥研究院智能研究所“973”首席科學家劉錦淮研究員課題組研發出“風光互補”自主式水面機器人。這款水面自動清潔機器人由水面漂浮物自動回收裝置和水面機器人組成,類似于家庭清潔機器人,主要應用于各種海洋、湖泊、河道、灘涂及景區內的湖泊、池塘的固體垃圾、浮萍等清理,以及危險區域進行遠程作業,提高安全性和高效性。
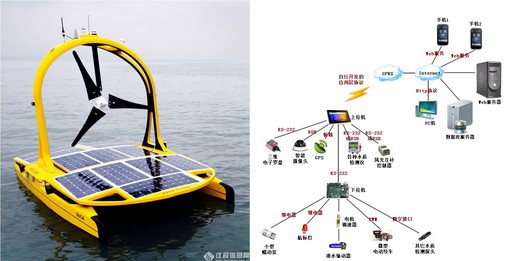
風光互補水面機器人通用平臺
據介紹,該水面機器人相對于現有水面無人船具有獨特優勢:動力來源于大容量電池、風力和太陽能發電混合電源系統,解決了水面機器人長時間持續巡航的動力問題;采用視覺和雷達雙模目標識別方法,在此基礎上自主開發了水面目標的路徑優化和自主壁障等智能算法,解決了水面機器人的全局路徑規劃和局部實時避障問題;融合了多模導航系統、三維電子羅盤、驅動器自動調速控制技術、高帶寬無線數據實時傳輸技術以及人工智能等技術,解決了水面目標自動控制問題;
此外,該項目研究成果以水面機器人為通用平臺,可搭建多種自主研制的具有行業力爭上游水平的水質監測儀器并小型化后集成到水面機器人平臺之中,形成水質監測移動實驗室,取代目前常用的水質固定監測站或者監測浮標,實現任意水域、全天候、原位和低成本水質監測與預警。

據相關科研人員介紹,國內現有的水面機器人水質檢測與采樣技術一般只能在線檢測常規的水質五參數指標,很難全面的檢測水中有機物、營養鹽和重金屬,只能采取把水樣采集好后再到實驗室去檢測,因此無法實現水中重金屬等重要污染物的原位和實時檢測。另外,現有技術一般只能檢測水域的淺層水,無法檢測水域中不同深度層面的水質立體斷面污染分布狀況。本項目以水面機器人為平臺,結合研制的新型小型化重金屬檢測儀器、不同深度水質自動采樣裝置以及水質原位在線檢測裝置,實現了水質立體斷面的原位和實時檢測與污染狀態分析。
目前,中科院合肥研究院智能所已形成樣機,并正積極推進產業化進程。


